
Join the tracking revolution

Buy now

Discord


Positional tracking
No calibration, no drift

24hr battery
All day tracking

Occlusion free
No line of sight needed

Light and small
Super comfortable


Positional tracking
No calibration, no drift

24hr battery
All day tracking

Occlusion free
No line of sight needed

Light and small
Super comfortable
Join the tracking revolution

Buy
Join our Discord

Join the tracking revolution
Buy
Discord
Positional tracking
No calibration, no drift
24hr battery
All day tracking
Occlusion free
No line of sight needed
Light and small
Super comfortable


Join the tracking revolution
Buy now
Discord
Positional tracking
No calibration, no drift
24hr battery
All day tracking
Occlusion free
No line of sight needed
Light and small
Super comfortable

Positional tracking
No calibration, no drift

24hr battery
All day tracking

Occlusion free
No line of sight needed

Light and small
Super comfortable
Join the tracking revolution
Buy now
Join our Discord
A new standard for tracking
FluxPose is the first affordable, truly portable, occlusion-free tracking solution with absolute positioning. No more bulky trackers or wall-mounted beacons, nor tedious setup or frequent recalibration. Stay immersed with comfortable, accurate and reliable tracking.
Absolute Positioning
Gloves, controllers, FBT, anything
Track anything
No need to know your body proportions
No calibration
Tracks under clothes, blankets and in any pose
No occlusion
Like Lighthouse tracking, FluxPose never drifts
No drift

Just 15 grams
5x lighter than a Vive 3.0 tracker
24 hour battery
Lasts all day
Details you can feel
Tracker
The lightest 6DOF tracker
Tracker provides absolute position and rotation
Moves with you
6DOF tracking with no boundaries
Unlimited Trackers
Per Beacon
Also a tracker
With all of the same features
Beacon
A base station on your hip
Beacon provides the signal for trackers to know their position
Fast charging
Charge your devices in under 1.5h
Forget about dongles
Wireless for up to 10 devices
Magnetic docking
Quick and satisfying

Dock
Compact and clutter free
Two-in-one charging dock and wireless hub, designed for a clutter-free setup

Accessories and add-ons
Dongle

Add up to 10 more trackers per each extra dock/dongle
Headset mount

Attach a tracker to your headset to align FluxPose with it
Magnetic strap
Straps with a quick, satisfying magnetic latch
1/4" adapter

Use your existing straps
Size matters
Small on your body, small on your desk, small in your bag
All you need is the dock with devices, some straps and a USB-C cable for high quality full-body tracking



* Depending on your height and environment, ankle tracking can perform better than foot tracking. Using two trackers per leg ensures reliable tracking across all conditions.
Lite kit

from
339€
excl.
tax
Waist + ankles/feet*/gloves
Dock + Beacon + 3 Trackers
Core kit

from
479€
excl.
tax
Lite kit + legs, arms or gloves
Dock + Beacon + 5 Trackers
Pro kit

from
689€
excl.
tax
Core kit + 3 additional trackers
Dock + Beacon + 8 Trackers
Add-Ons

from
7-99€
excl.
tax
Trackers, dongles, straps, etc.
Available separately
Meet our kits
Headset adapter included, straps available as add-on.
FluxPose Demos



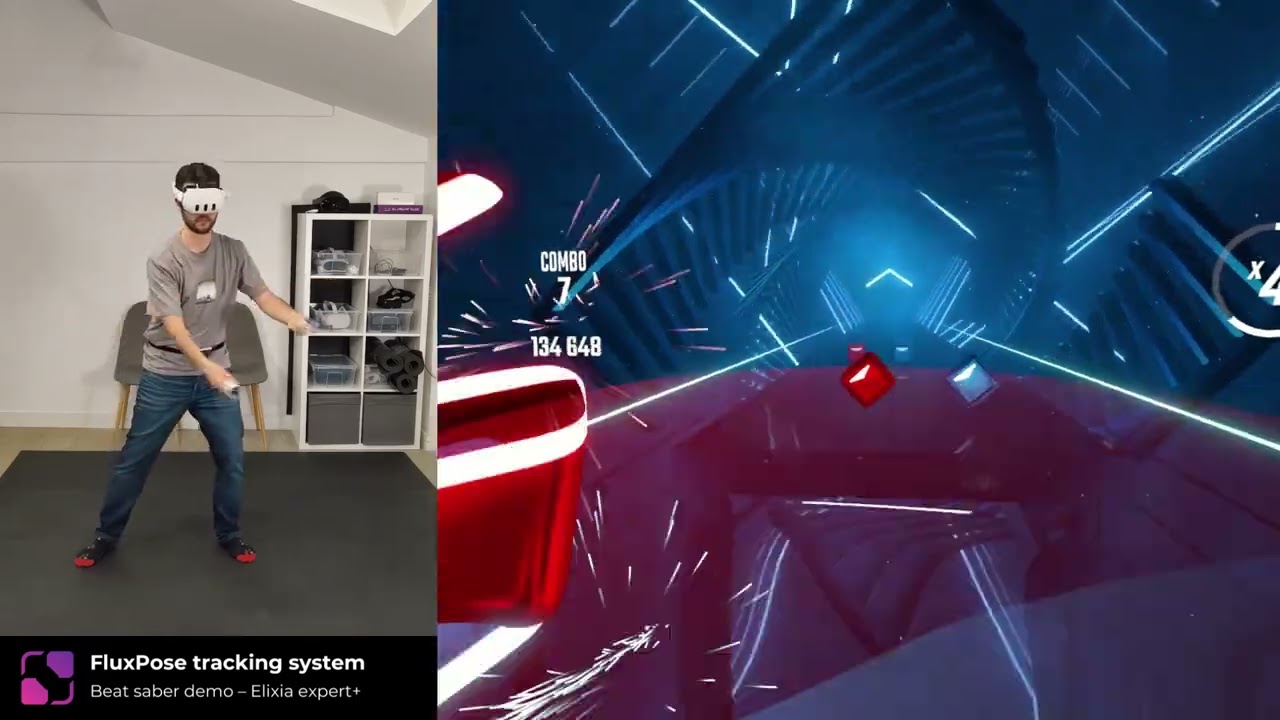
Already in use
Not just a concept, but a real system that's already in use by VR enthusiasts.
We have sent beta kits to more than 12 people to test the system in the real world.
Join our Discord to chat with the testers and see the results.




















Thanks to the dedicated beta-testing team :)
Join our Community


Generates a magnetic field around it
The beacon
Measures this magnetic field to know where it is relative to the beacon
The tracker
Changes polarity ~20,000 times a second so trackers can ignore other magnetic fields (like the earth's or other magnets)
The magnetic field
Receives the tracking data and sends it to your PC or headset
The dock
A tracker attached to
Your headset
Magically aligns FluxPose to your playspace
Work alongside the magnetic tracking to improve the quality of the tracking
Additional sensors
How it works
Generates a magnetic field around it
The beacon
Measures this magnetic field to know where it is relative to the beacon
The tracker
Changes polarity ~20.000 times a second so trackers can ignore other magnetic fields (like the earth's)
The magnetic field
A tracker attached to
Your headset
Alligns FluxPose to your playspace
Work alongside the magnetic tracking to improve the quality of the tracking
Additional sensors
Receives the tracking data and sends it to your PC or headset
The dock

Assembled only with screws, no glue needed
Easy to open
No soldering required
Simple battery replacement
Everything you need to repair and tinker
Extensive documentation
Build software to control anything available in the UI
Powerful SDK
Use FluxPose to send custom data to your PC/headset
Expandable IO
Use custom firmware
Unlocked bootloader
Built for tinkering
Just a few screws and connectors
Easy to open & repair
Simple battery replacement
No soldering required
Everything you need to repair and tinker
(initial versions available on the downloads page)
Extensive documentation
Build software to control anything available in the UI (and way more!)
Powerful SDK
Build controllers or robots using FluxPose as your tracking and communication link.
DIY expandable
Flash the trackers with your custom firmware and do anything you want with them!
Unlocked bootloader













Choose your kit

Extra Tracker
Allows you to track an extra object or body part

2 Extra trackers
Each tracker allows you to track an extra object or body part


Extra hub
Add an extra hub to charge all devices at once
Extra Hub / Dongle
Add an extra hub or dongle to use more than 10 devices. With an extra hub, you can also charge all devices at once.
Lite kit
3x Tracker
1x Beacon
1x Dock
+ Accessories

Core kit
5x Tracker
1x Beacon
1x Dock
+ Accessories
Pro kit
8x Tracker
1x Beacon
1x Dock
+ Accessories